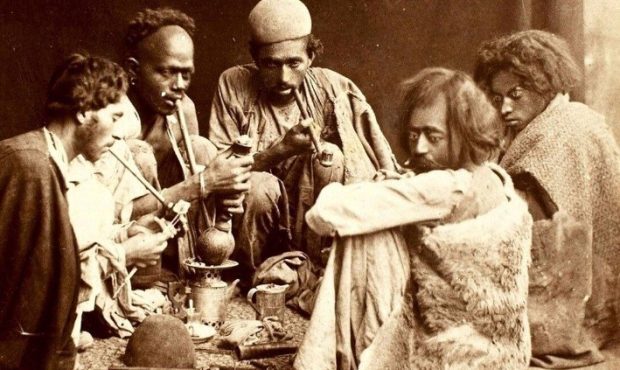
 چگونه تریاک به مهمترین محصول صادراتی ایران تبدیل شد ؟
چگونه تریاک به مهمترین محصول صادراتی ایران تبدیل شد ؟ جادوی تکنولوژی؛ تجهیز دستهای رباتیکی به حس لامسه؟
محققان رباتی طراحی کردند که برای دستیابی به اجسام به دادههای بصری نیاز ندارد و اشیاء را با لمس کردن کنترل میکند.

دست انسان بهطور شگفتانگیزی پیچیده است، به طوری که اکثر رباتهای مدرن و سیستمهای هوش مصنوعی درک درستی از نحوه کارکردشان ندارند.
اگرچه ماشینها در حال حاضر در گرفتن و جایگزینی اشیاء بسیار مناسب هستند، دستکاری واقعی اهداف آنها (یعنی مونتاژ، تغییر جهت و بستهبندی) تا حد زیادی مبهم باقی مانده است؛ با این حال اخیرا محققان یک ربات حرفهای ایجاد کردند.
گروهی از مهندسین کلمبیا به تازگی از یک «دست» رباتیک پنج رونمایی کردهاند که تنها بر حس لامسه پیشرفته خود، در کنار الگوریتمهای یادگیری موتور، برای کنترل اشیاء بدون نیاز به دادههای بصری، متکی است.
هر یک از انگشتان ربات جدید مجهز به حسگرهای لمسی بسیار حساس در کنار ۱۵ مفصل فعال کننده مستقل است. اشیایی با شکل نامنظم مانند یک توپ مینیاتوری در دست قرار داده شد تا ربات بتواند بدون انداختن آنها بچرخد و مانور دهد. در کنار دادههای لمسی «زیر میلیمتری»، ربات به چیزی که به عنوان «حساسیت عمقی» شناخته میشود، متکی بود. اغلب به عنوان «حس ششم» شناخته میشود، حس عمقی شامل تواناییهایی مانند موقعیت فیزیکی، نیرو و خود حرکتی است.
طبق بیانیهای از Columbia Engineering، این نقاط داده سپس به یک برنامه یادگیری تقویتی عمیق وارد شدند که قادر بود تقریبا یک سال زمان تمرین را تنها در چند ساعت از طریق شبیه سازهای فیزیک مدرن و پردازندههای بسیار موازی شبیه سازی کند.
Matei Ciocarlie، دانشیار دپارتمانهای مهندسی مکانیک و علوم کامپیوتر، در اطلاعیهشان توضیح داد که هدف جهتدهی این رشته، رباتیک کمککننده در خانه است، زمینهای نهایی برای اثبات مهارت واقعی.
به گفته محققان وقتی بازخورد بصری را همراه با لمس به ترکیب اضافه کنیم، امیدواریم بتوانیم به مهارت بیشتری دست یابیم و روزی به تکثیر دست انسان نزدیک شویم. در نهایت، تیم امیدوار است این مهارت و درک را در کنار هوش انتزاعی، معنایی و تجسم یافتهتر ترکیب کند.
تازهترین اخبار و تحلیل رویدادهای ایران و جهان را با نصب اپیلکیشن خبرخوان گردون به سهولت دنبال کنید.
اخبار مرتبط
پیشنهاد ویژه
مجله زندگی
چگونه تریاک به مهمترین محصول صادراتی ایران تبدیل شد ؟  معرفی فیلمهای رمانتیک جدید که بالاترین امتیاز را کسب کردهاند
معرفی فیلمهای رمانتیک جدید که بالاترین امتیاز را کسب کردهاند  عکس | خانم بازیگر آخرین عکس خود را در عجیب ترین محله ترکیه ثبت کرد
عکس | خانم بازیگر آخرین عکس خود را در عجیب ترین محله ترکیه ثبت کرد  پورشه میلیاردی شام شب موش نحیف شد
پورشه میلیاردی شام شب موش نحیف شد 
ارسال نظر
پربازدیدترین
آخرین اخبار
