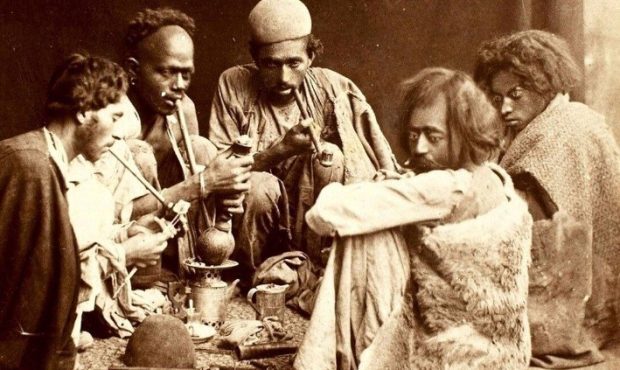
 چگونه تریاک به مهمترین محصول صادراتی ایران تبدیل شد ؟
چگونه تریاک به مهمترین محصول صادراتی ایران تبدیل شد ؟ ویدیو | سفر شگفتانگیز کرم خاکی به کره ماه؛ ماجرا چیست؟
روباتهای کرم خاکی به لطف بدن نرم و تواناییشان برای ورود به مواد مختلف سطحی، میتوانند نقش مهمی در کشف اسرار سیارات و قمرهای منظومه شمسی ایفا کنند.
هنگام طراحی رباتها برای اکتشاف فضا، مهندسان و توسعهدهندگان اغلب برای الهام گرفتن به طبیعت روی میآورند. از مارها گرفته تا کرم ها و حتی ماهی ها، انواع مختلفی از حرکات طبیعی توسط بدن روبات های فضایی تقلید شده است. آخرین مورد از این اجسام رباتیک از کرمهای خاکی الهام گرفته شده است. از آنجایی که کرمهای خاکی برای زنده ماندن در انواع مختلف خاک تکامل یافتهاند و اغلب در فضاهای محدود میچرخند، بدن آنها میتواند برای کاوش سیارات خارجی عالی باشد.
ربات کرم خاکی در حوزه "رباتیک نرم" قرار می گیرد، جایی که مهندسان و توسعه دهندگان ربات هایی با بدنه نرم و انعطاف پذیر که معمولاً از سیلیکون یا لاستیک تشکیل شده است، طراحی می کنند.
میرا دی تاولر، مهندس ارشد پژوهشی در موسسه تحقیقات جنوب غربی که روی رباتیک نرم مطالعه میکند، میگوید: رباتیک نرم برای چندین کار از نظر زمینی مناسب است، به ویژه برای جابجایی اقلام ظریف یا انعطافپذیر. "این شامل وظایفی مانند کشاورزی و حمل و نقل مواد غذایی است. همین نوع وظایف در فضا برای کمک به عملیات پشتیبانی در ایستگاه فضایی مفید است.
رباتهای نرم بسیار ارزشمند هستند زیرا میتوانند قابهای انعطافپذیر خود را کشیده یا بپیچانند تا در فضاهای کوچکتر قرار بگیرند یا در میان آنها حرکت کنند. در مورد روباتهای کرم خاکی داس، آنها حتی میتوانند در خاک فرو بروند تا از شرایط سخت سطحی که در جهانهای مجاور دیده میشود اجتناب کنند. با این حال، در حالی که این ربات ها مزایای منحصر به فردی دارند، محدودیت های خود را نیز دارند. تاولر افزود که این ماشینها «ذاتاً برای خلاء فضا مناسب نیستند». این چالش دانشمندانی مانند Das را مجبور میکند تا روی طراحیهای بدنهای کار کنند که رباتهای نرم را در برابر خلاء مقاومتر میکنند و بنابراین برای استقرار همهکارهتر هستند.
بر خلاف رباتیک نرم، "رباتیک سخت" بر طراحیهای بدنه رباتیک ساختار یافتهتر از مواد سفت و سخت مانند پلاستیک یا فلزات، مانند مریخ نوردهای سیارهای تمرکز دارد. از بازوهای روباتیک گرفته تا چرخها، این «رباتهای سخت» ممکن است برای حمل بارهای سنگین از مواد سیارهای، مانند نمونههای سنگ، یا برای حرکت در زمینهای صخرهای یا ناهموار طراحی شوند.
به گفته مارتین آزکاراته، مهندس سیستم ناوبری ربات برای آژانس فضایی اروپا (ESA): «زیر سیستم حرکتی یک مریخ نورد اکتشافی همیشه به زمین اکتشافی هدف بستگی دارد. به عنوان مثال، ما فقط مریخ نوردهای چرخدار را در مریخ دیدهایم زیرا این کارآمدترین حالت حرکت برای عبور از زمینهای وسیع در مریخ است.»
به عبارت دیگر، اگرچه روباتهای سخت به وضوح دارای نقاط قوت خاصی هستند، مانند توانایی تحمل محیطهای شدید و حمل بارهای سنگین، اما فاقد انعطافپذیری روباتهای نرم هستند.
تازهترین اخبار و تحلیل رویدادهای ایران و جهان را با نصب اپیلکیشن خبرخوان گردون به سهولت دنبال کنید.
اخبار مرتبط
پیشنهاد ویژه
مجله زندگی
چگونه تریاک به مهمترین محصول صادراتی ایران تبدیل شد ؟  معرفی فیلمهای رمانتیک جدید که بالاترین امتیاز را کسب کردهاند
معرفی فیلمهای رمانتیک جدید که بالاترین امتیاز را کسب کردهاند  عکس | خانم بازیگر آخرین عکس خود را در عجیب ترین محله ترکیه ثبت کرد
عکس | خانم بازیگر آخرین عکس خود را در عجیب ترین محله ترکیه ثبت کرد  پورشه میلیاردی شام شب موش نحیف شد
پورشه میلیاردی شام شب موش نحیف شد 
ارسال نظر
پربازدیدترین
آخرین اخبار
