 چگونه تریاک به مهمترین محصول صادراتی ایران تبدیل شد ؟
چگونه تریاک به مهمترین محصول صادراتی ایران تبدیل شد ؟ مار پرنده الهامبخش رباتها شد + عکس
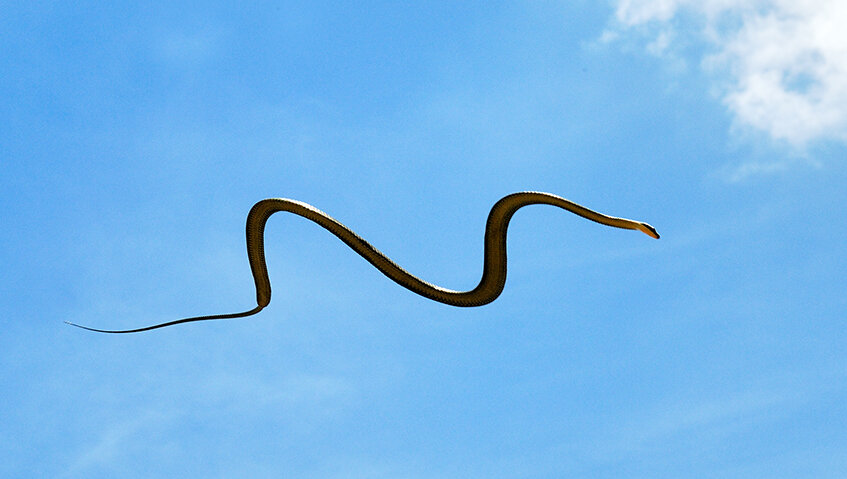
محققان موفق شدند از تکنیکهای لغزیدن و سر خوردن مارهای درختی بهشتی، برای هدایت بالقوه رباتها استفاده کنند.

مار درختی بهشتی به یک خانواده منحصربفرد از مارها تعلق دارد که توانایی «پرواز کردن» در هوا را دارند، و برای کسانی که از اوفیدیوفوبیا(Ophidiophobia- ترس از مار یا خزندگان) رنج میبرند، ایجاد وحشت میکنند. Chrysopelea paradisi یا همان مار درختی بهشتی که در جنوب شرقی آسیا زندگی میکنند، بعد از اینکه خود را از شاخههای درختان پرتاب میکنند، بدن خود را صاف میکنند تا بیشتر آیرودینامیک شوند، سپس با یک الگوی خاص موجی ایجاد میکنند و میتوانند در یک پرواز تا ۲۵ متر اوج بگیرند.
این یک شاهکار چشمگیر است، اما این مارها لزوما اولین حیواناتی نیستند که انتظار داشته باشید دانشمندان برای طراحی رباتهای جدید به سراغ آنها رفته باشند و از آنها الهام بگیرند. تیمی از محققین از دو دانشگاه ویرجینیا و تکنولوژی ویرجینیا، اخیرا پتانسیلهای نهفته در استعداد مارها را مشاهده کردهاند و از تحلیلهای محاسباتی برای شکستن پیچیدگیهای حرکت آنها استفاده کردهاند تا در آینده، پیشرفتهایی را در حرکت رباتها ایجاد کنند.
در مقالهای که در Fluids in Physics منتشر شد، این گروه تحقیقاتی، ابتدا دادههایی را از فیلمهای ویدئویی پرسرعتی که از مارهای درختی در حال پرواز گرفته شده بود را جمعآوری کردند، و آنها را به یک برنامه محاسباتی که برای تجزیه و تحلیل جزئیات حرکات آنها طراحی شده بود، دادند. مشخص شد مارها برای ایجاد موج در بدنشان از همان مکانیزم جریان هوایی استفاده میکنند که روزانه برای پرتاب فریزبی(دیسکهای پرنده) از آنها استفاده میشود. مارها جریانی با فشار بالا در زیر شکم خود ایجاد میکنند و این باعث ایجاد ناحیهای با فشار کم و نیروی مکش مانندی در پشت آنها میشود. این حالت باعث میشود تا لقب «پروازکننده» به این مارها تعلق گیرد.
هایبو دانگ، یکی از محققین در دانشگاه ویرجینیا و یکی از نویسندگان این مقاله در بیانیهای گفت: «موجهای افقی مارها، ساختارهای گردابی بزرگی را تولید میکنند، که شامل گردابههای لبه جلویی (LEV)، و گردابههای لبهی انتهایی(TEV) هستند. ایجاد و گسترش LEV در قسمت بالایی و پشتی سطح بدن مار نقش مهمی در بالا بردن و اوج گرفتن آنها دارد.»
یکی از یافتههای شگفتانگیز این بود که ترفند مارهای پرنده برای افزایش فاصله، زمانی که در هوا هستند، ایجاد تناوب و تکرار حرکتهای پهلو به پهلوی آنها است. به طور کلی، مارهایی مانند مار درختی بهشتی، زمانی که بین شاخه درختان پرواز میکنند یا روی زمین قرار دارند، در هر ثانیه بین یک یا دوبار پیچ و تاب میخورند، و این کار را معمولا برای فرار از دست شکارچیان انجام میدهند. به طور فرضی اگر آنها بتوانند این کار را سریعتر انجام دهند، ظاهرا این افزایش حرکات، آنها را از حالت تعادل خارج میکند و در نتیجه آیرودینامیک آنها کاهش مییابد.
متاسفانه محققان در حال حاضر هیج نمونه اولیهای از مارهای پرنده رباتیکی را آزمایش نمیکنند، اما تجزیه و تحلیلهای اخیر، اطلاعات خوبی را در اختیار طراحان آینده قرار خواهد داد تا چنین خلاقیتهایی را به یک امکان بسیار واقعی تبدیل کنند. زمانی که این رباتها ساخته شدند، شما میتوانید آنها را در کنار رباتهایی که با الهام از حیواناتی نظیر سگها، عنکبوتها و اختاپوسها ساخته شدهاند قرار دهید.
تازهترین اخبار و تحلیل رویدادهای ایران و جهان را با نصب اپیلکیشن خبرخوان گردون به سهولت دنبال کنید.
اخبار مرتبط
پیشنهاد ویژه
مجله زندگی
چگونه تریاک به مهمترین محصول صادراتی ایران تبدیل شد ؟  معرفی فیلمهای رمانتیک جدید که بالاترین امتیاز را کسب کردهاند
معرفی فیلمهای رمانتیک جدید که بالاترین امتیاز را کسب کردهاند  عکس | خانم بازیگر آخرین عکس خود را در عجیب ترین محله ترکیه ثبت کرد
عکس | خانم بازیگر آخرین عکس خود را در عجیب ترین محله ترکیه ثبت کرد  پورشه میلیاردی شام شب موش نحیف شد
پورشه میلیاردی شام شب موش نحیف شد 
ارسال نظر
پربازدیدترین
آخرین اخبار
خواندنی ها
نیازمندیها
دیگر رسانه ها